Kevo, Finland
IU KEV commences operations on: 1993,158
| Host | Institute of Seismology, Univ. of Helsinki |
|---|---|
| Network | IU |
| Latitude | 69.7565 |
| Longitude | 27.0035 |
| Elevation | 100 |
| Datalogger | Q330-HR |
| Broadband | Pending |
| Accelerometer | Pending |
| Telemetry Status at the NEIC | Pending |
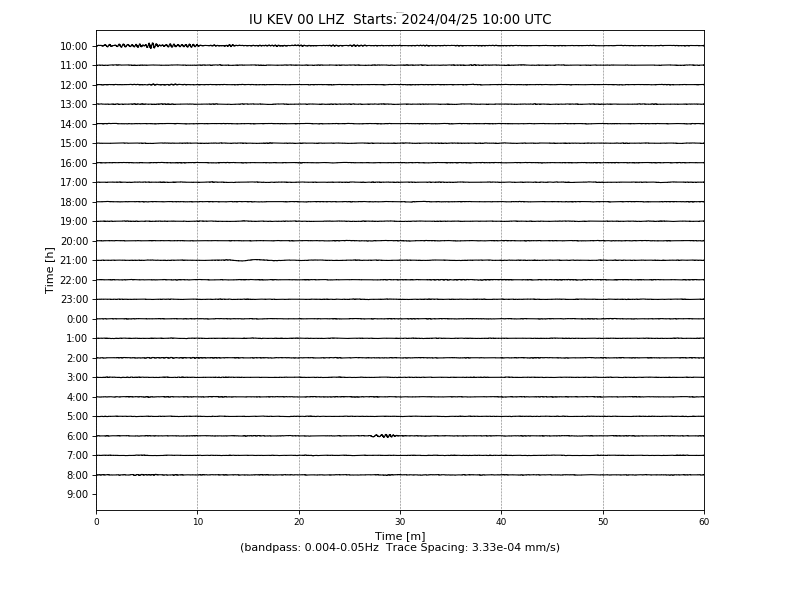
Heliplot