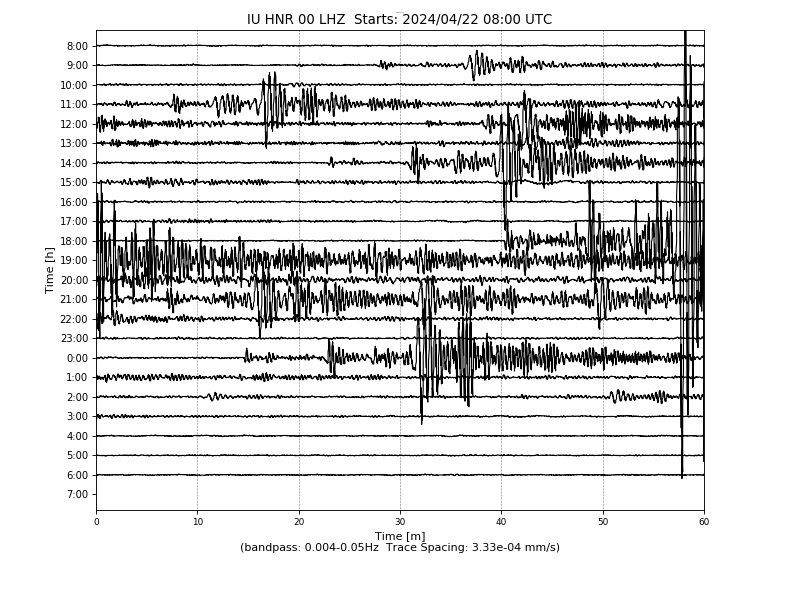
Honiara, Solomon Islands
IU HNR commences operations on: 1993,295
| Host | Dept. of Mines, Energy, and Water |
|---|---|
| Network | IU |
| Latitude | -9.439 |
| Longitude | 159.947 |
| Elevation | 99 |
| Datalogger | Q330-HR |
| Broadband | Trillium 360 |
| Accelerometer | Kinemetrics FBA ES-T EpiSensor Accelerometer |
| Telemetry Status at the NEIC | Pending |
Site





Heliplot
Latency

Availability
Past 30 Days
Past 365 Days
Yearly
